 |
|
(Last update:)
[実験試作体](HMX PROJECT)
▲実験用仮想体:HMX-00(セロ)▼ ▲基本フレーム試作体:HMX-10『プロト』▼ [実証試作体](HMX PROJECT) ▲実証試作機:HMX-11『アルファ』▼ [実用試作体](HMX PROJECT) ▲実用試験用試作機:HMX-12『マルチ』▼ ▲初期能動動作学習用基本フレーム:HMX-1xp(子マルチ)▼ ▲実用試験用試作機:HMX-13『セリオ』▼ ▲先行量産機:HMX-14(名称無し)▼ [高度実証試作体](HMX EXTEND PROJECT) ▲基本フレーム試作体:HMX-20『ソア』▼ ▲実証試験用試作機:HMX-25『リーラ』▼ ▲実証試験用試作機:HMX-24『ティア』▼ ▲追加実証試験用試作機:HMX-26(マルチ2)▼ ◆用語解説◆ はじめにHMXシリーズは、来栖川重工社製汎人機(※)の一つの到達点と言って過言ではあるまい(販売は来栖川エレクトロニクスから行われたが、開発・生産は来栖川重工が担当している)。それは同社の人型介護/自立支援システム・HASS(Humanoid for Assistance and Support System)シリーズの開発で培われてきた高度な汎人機開発技術と、その実際の運用から得られた様々なノウハウの集大成であり、その一方でHASSで採用されていた重み付けされた優先順位によるシーケンシャル処理とは完全に決別した平行処理型の連鎖連想アルゴリズムを採用したCNS(中枢処理システム)、物理量として電力を保持するトカマク型超伝導バッテリ、高機能インテリジェント素材群、光ファイバ型アクチェータなど、数多くの新規開発技術が惜しげもなく投入された、あまりに贅沢な試作品でもあった。 また同時に、HMXシリーズはその開発において、HASSシリーズなどでは全く考慮する必要のなかった多くの制約を課せられていた。その中で特に重要視されたのは製品段階での販売価格、特別なコンソールを必要としないFTF(マルチモーダル)インタフェイス、そして高度な自立判断能力である。もっとも厳しい制約となった販売価格は、HASSシリーズの約十分の一程度、普通乗用車並みの価格であることが要求されていた。 これは、HMXのもつポテンシャルから考えれば、ある種無謀とも言える制約であった。 当時は、高価かつ特殊用途に最適化された『汎用人型機械』とは名ばかりの汎人機が市場の大部分を占め、一般家庭内用の汎人機といえば、ペットロボットを二足歩行化し、人型サイズにしたもの以上のモノではなかった。最も人手を必要としているはずの家事全般の作業補助・代行に関しては、全くの手つかず状態だったのである。HMXは、そうした一般家庭という「最も見落とされがちな、最も重い労働」から、使用者を開放するために開発が始められた。 つまり、HMXシリーズは来栖川重工製汎人機の『フラッグシップ』(最高級機種)開発を意図したものではなく、当初から『一般家庭向け汎人機』という新たなる市場を切り拓くべく開発がなされたものだったのである。 HMX以前、以後と言われることすらある様に、HM/Xシリーズ発表以後の汎人機の世界は大きく様変わりし、汎人機は今や『ある意味で人類以外の新たな知的存在』と呼ばれる程の発展を遂げている。こうした、発展の原点とも言えるHM/Xシリーズの詳細を再検討することは、いまの汎人機を概観する上で重要な要素の一つとなるのは間違いあるまい。 本書『偽’機械主義者〜SINE QUA NON』は、HM/Xシリーズの全容を解説しつつ、HM/Xが必要とされた社会状況や、HM/X開発の前提となった各種技術などを概観していく。 (※:『メイドロボ』は来栖川重工社の登録商標。) 機体形式番号について機体形式番号は以下のようなルールに基づいている。
一般的に、HMX-12は『12番目のHMシリーズ試作/実験体』と思われている場合が多いが、実際は『1型の基本フレームを使用し、2型の中枢処理システム(以下CNS)を搭載したHMシリーズ試作/実験体』の意味で使われている。また、特殊用途のため特殊用途のための開発コードは、例えば『HMX-13c』の場合『開発コードc』は『特定医療機関のための低電子雑音型』を示している。 ただし、この開発コードは、プロジェクト内で各開発担当者が適宜決めていったもので、特にこれといった規則性はない。そのため、HMX-11においては、『コードb』が『二体目の試作体』を意味しているのに、HMX-12/13以後は同一設計の複数の試作体を識別するのに、例えばHMX-12a-0のようにハイフン(−)の後に試作体番号を追記する方向に改められている。また、『コードc』によく似た『コードci』は、医療機関や低電子雑音とは全く無関係の『ノイマン型補助電脳搭載型』を意味しているなど、当時の開発部員以外には、全く分からないものになってしまっている。 ここで単に型版だけを考えれば、HMX-21型やHMX-16型などが存在してもおかしくはないが、実際は、基幹情報光バス(通称、脊椎ファイバ)のコネクタ形状や転送可能データレートなどの関係などから、基本フレームとCNSの設計は密接に関係している。そのため、通常CNSは特定の基本フレーム(アクチェータフレーム)のみに対応した設計が行われている。 HMXシリーズでは、HMX-1x基本フレーム用にHD-CNS 1/2/3が、HMX-2x基本フレーム用にLD-HD-CNS 4/5/6(Light-Diffraction HoloDynamic CNS)が、ぞれぞれ専用CNSとして採用されている(HD-CNS 4をHMX-1x型基本フレームに用いたHMX-14は設計終了前に試作が白紙撤回されている)。 HMX-00
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 HMX-00は、HMシリーズ開発の前段階として設計製作される試験機HMXの為の、各種データを収拾するためにスーパーコンピュータなどのシミュレーション空間内で扱われる仮想体である。
HMX-00は、HMシリーズ開発の前段階として設計製作される試験機HMXの為の、各種データを収拾するためにスーパーコンピュータなどのシミュレーション空間内で扱われる仮想体である。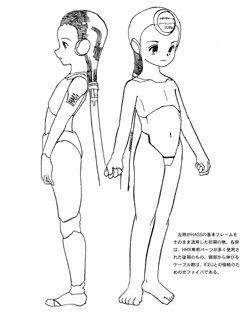 HMX-1x基本フレーム試作機。
HMX-1x基本フレーム試作機。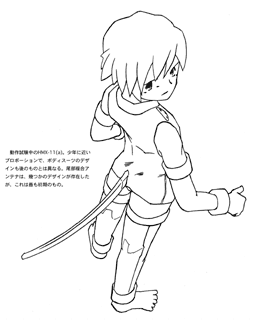 HMX-00、HMX-10の試作や、それらに対する様々なテスト等から得られた情報を元に試作されたHD-CNS Type1を初めて実装したHMXシリーズの実証試験機。
HMX-00、HMX-10の試作や、それらに対する様々なテスト等から得られた情報を元に試作されたHD-CNS Type1を初めて実装したHMXシリーズの実証試験機。 HMX-13とともに実用試験用試作機として製作され、量産機候補となった試作機。
HMX-13とともに実用試験用試作機として製作され、量産機候補となった試作機。 HMX-12とともに実用試験用試作機として製作され、量産機候補となった試作機。
HMX-12とともに実用試験用試作機として製作され、量産機候補となった試作機。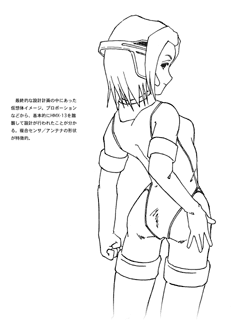 量産化のための情報を得るために計画された試作体。
量産化のための情報を得るために計画された試作体。| HMX計画 | HMX-00 | HMX-10 | HMX-11 | HMX-1xp | HMX-12/13 | |||
| 拡張HMX計画 | HMX-20 | HMX-25 | HMX-14(注1) | HMX-24 | ||||
| HMX計画終了後 | HMX-26(注2) | |||||||
|
(注1):HMX-14は設計終了前に試作が白紙撤回。 (注2):完成時期は拡張HMX計画中だが、起動試験は行われなかった。 |
||||||||
HMX-2x型基本フレームのHMX-1x型との最大の相違点は、アクチェータが電磁モーター型から光ファイバ型に変更された事である(編注:元来、単に『アクチェータ』と呼ばれるものは、通電によって動作を行うものをさして言う。光ファイバ型アクチェータは『光アクチェータ』と呼ばれるものの一種である)。
光ファイバー型アクチェータは、以下のような特徴を有している。
- DA/ADコンバーターを介さず光伝導系と直接データ交換が可能であるため、変換による情報ロスを軽減できる。
- モーター型と異なり柔軟性を持った光ファイバの束であるために、設計上高い自由度を持たせることが出来る。
- 一つのアクチェータが数千〜数万本の微細アクチェータの集合体で構成されているために、一部損傷時でも不完全ながら駆動させることが可能であり、安全率を高めることができる。
- エネルギー変換効率が高い。
これだけの利点を有しながら、HMX-2x型基本フレームはHMシリーズには採用されず、製品化される事はなかった。これは完全な新規技術である光ファイバ型アクチェータを基本フレームに採用した場合、競合他社製品に対してコスト面で不利になるという点と、各小売りチャネルからの整備面、部品供給面での不安が多く寄せられたためである。
後に発表されたHM-2x/HM-3x型基本フレームもHM-1x基本フレームとの構造的な相違点は少なく、アクチェータ部品の性能向上などを行っただけのブラッシュアップに留まっている。
同様の新規技術であり、小売チャネル等から同じ様な不安がよせられたにも関わらず、上層部が最後までHMXへの搭載にこだわり続けたトカマク型超伝導バッテリとは対極的な扱いがなされたのは、来栖川重工内での開発部門の力関係が如実にあらわれている。
光ファイバ型アクチェータを開発したのは「開発八係」(現在の来栖川HMテック)である。開発八係は、クラッシュプログラムであったHMX計画に於ける各部門間の連絡や意思の疎通を計ることを目的として、特に設けられた係で、各部門からの出向者によって構成されていた。だが、開発八係にはHMX計画の当初から、各部門の技術者たちが集まり、次第に、お互いの専門知識と経験を共有する場として利用されるようになっていった。当初の設置目的とは、大きく異なった方向で、開発八係は大きく発展しはじめたのである。
設置から一年もしない間に、開発八係は、独自にMX-10用の新素材部品の設計と試作を開始するなど、活発な活動を行いはじめている。こうした事から、計画関係者から一目置かれる存在となった開発八係だが、その後、HMX用のパーツや素材の開発の一部を担うなど、事実上の独立開発セクションとしての地位を確立した。
来栖川グループ内のHM開発専門の子会社『来栖川HMテック』として改編されるまで、正式な部署としては認められることの無かった開発八係だが、HMX-1xpの発案や、実際の設計と開発を担当し、またHD-CNSの初期能動学習を受け持つなど、HMX開発計画に少なからぬ貢献をし、後の延長HMX計画では、HMX-26開発で中心的な役割を果たすまでに至っている。
一方のトカマク型超伝導バッテリの開発を行ったのが、来栖川重工の発足当初からの主力製品であった大型発電機/電動発動機の研究と開発を担ってきた発動部である。
来栖川重工内にある会社組織とも言える発動部は、開発部とは別に独自の開発部門を持ち、社内で強い発言力を持っている。発動部は、HMX開発計画の、その当初からトカマク型超伝導バッテリの使用を提唱し、超伝導バッテリの研究・開発に相当の予算と時間、人材を費やした。これらで費やされた金額は、当時の電動部の年間純利益に匹敵しているとも言われている。しかし、来栖川重工社内にあって独立採算制をとっている発動部内で、どのような動きがあったのかを知ることは難しい。
数多の失敗と無数の試行錯誤から誕生したトカマク型超伝導バッテリは、一般民生用HMシリーズでの採用こそならなかったが、ライバルと目されてきたECSキャパシタとの住み分けに成功し、現在は中規模以上の貯電施設などに採用されている。
HMX-25:リーラ
「間違って、彼女に書類渡しちゃったんですよ。まさか、あれが試作体だなんて思いもしませんでした。」
(経理部:桑原翔太)
それまで搭載されていた固体半導体型HD-CNSを抜本的に改良した回折光シャッター型光回路CNS(R&Dではこれを光ホロダイナミックCNSと呼称している)を搭載。完成時期はHMX-12/13のロールアウト直後だが、研究所施設内での基本能力試験が行われ、その後、社内で非公式な形での各種テストが行われた。HMシリーズの量産化に伴うHMXシリーズ開発終了を以て保全管理扱いとなる。
動力源として、燃料電池型バッテリに代えて超伝導バッテリと同様、物理量で電力を保存し、常温での動作が可能なECSキャパシタの採用が検討されたが、全てを自社開発で行うことにこだわった上層部の意向により、実現はしなかった。
HMX-25は基本的にHMX-13型の逐次検索・逐次処理の知能システムを継承しているが、光回路CNSの処理能力とあいまって、HMX-24との性能の差異はほとんど認められなかったと言われている。未公開情報が多いために性能の詳細は定かではないが、HMX-1xシリーズとは異なり、教えられなければ汎人機であることに気がつかなかった者も多かったようである。
HMX-24:ティア
「誰が、新入社員の中にうちの試作型メイドロボが紛れ込んでる、なんて思いますか?。」
(人事第三課課長:大瀧巌)
リーラ型の光回路CNS(LDHD-CNS)と試作が大幅に遅れていたトカマク型超伝導バッテリが搭載された。マルチ型並列処理を継承した新型知能システムを採用。並列型連鎖連想アルゴリズムの光回路CNSへポーティングの遅れから、HMX-25より遅れてロールアウト。光回路CNSやトカマク型超伝導バッテリ(これは化学的にではなく、超伝導コイルによって物理的に電力を保存する)の安全性などの問題から、研究施設内だけで動作試験が行われた。各種動作試験、性能試験で所定の目標を達成したHMX-24は、バッテリをHMX-13と同じハイブリッド型燃料電池に換装し、来栖川重工R&D内での非公開エンデュランステストを受けることになった。このテストは、ティアを来栖川重工R&Dの新入社員『来栖るい』として一般社員と同様に出社させ、周囲の人間がHMX-24がメイドロボである事に、どこまで気がつかないかを試すという、ある種の耐久チューリングテストといってよいものだった。
HMX-24はテストの行われた約八週間、何回か、その微妙な行いを指摘されたことはあっても、最後まで彼女がメイドロボであることを指摘する社員はいなかった。HMX-24は、普及価格帯での販売を前提とした汎人機の中で、当時としては桁違いの成績を叩き出したのである。
HMX-12/13の妹たちとも言えるHMX-24/25に関しては、この他にも様々な憶測や予想が流れている。しかし、開発部部外秘が多い事もあり、その本当の姿は予想する以外にない。
HMX-25と共に保全管理される。
HMX-26:(名称無し)
※『マルチ2』と呼称される場合がある。
「誰かが言ったんです『私たちは入れ物を作っただけで、彼女はそこに来ただけだ』って。私も、今はそう思います。」
(中央情報センター:高津信雄)
 HMX-2x型フレームに、新型光回路脳を搭載した追加実証試験用試作機。
HMX-2x型フレームに、新型光回路脳を搭載した追加実証試験用試作機。ほぼ完成し、ロールアウト直前の状態だったが、HMX-12/13のトライアルの結果に対する来栖川重工上層部の混乱から、延長が決定されていたHMX計画そのものが突如として中断・終了させられたため、HMX計画の中では起動試験すら行われなかった。
HMX-26はHMXシリーズ開発の中で培われたさまざまな技術・ノウハウの集大成として試作が行われた『HMXシリーズ最終型』とも言えるものである。
安全性などの問題から、トカマク型超伝導バッテリではなく、燃料電池が搭載されている。これはHMX-13で装備されたものをベースに、さらに小型・効率化を行ったもので、カーボンナノチューブを利用した新型キャパシタと燃料電池を組み合わせたハイブリッド型のものである。開発八係が中心となって開発を行った新型キャパシタは、それまでの固定電解質(リチウム・ポリマー)型の数倍の容量を持つ。また、燃料電池側には、炭素新素材である超微孔二重グラファイトシートを採用し、さらに熱電対を利用する事でさらに効率を高めている。
また、光回路HD-CNSもHMX-24/25型のものをブラッシュアップし、技術的に熟成させた新型のものを搭載している。
HMX-2x型基本フレーム自体は、光ファイバー型アクチュエータの信頼性を高めることに重点を置いた改良がなされている。これは、駆動系に全く新しい技術を用いているHMX-2x型基本フレームは、この段階では、より高い性能よりも、より高い安定性・信頼性を求められた結果である。これにより、HMX-26は、より人間に近い作業能力を得たとされている。
HMX-12/13においては解決することができなかった、味覚と嗅覚の問題に関しても、炭素系新素材を用いた新型センサを採用し、人間並みの感覚を持つことが可能となった。このセンサは、HMX-26においてテストされた後、HMX-3x型基本フレームの標準センサとして採用される事となり、感覚という面での汎人機の一つのブレイクスルーとなったのである。
本機、HMX-26は、数奇な運命を辿った(辿りつつある)汎人機である。HMX計画、拡張HMX計画の中では起動すら行われなかったHMX-26は、当初は保全管理のため、来栖川重工R&D宮ヶ峰保全倉庫に搬送される予定だった。
ところが、トライアルや長期耐久テストなどで使用されたHMX-12が基本フレームの設計寿命を迎え、廃棄処分される事になった際、これに搭載されていたHD-CNSの内容(記憶)は『人工知能心理学上、非常に貴重だ』という意見が開発部に持ち上がり、独自の判断で保存する決定が下された。そのHMX-12のHD-CNSの内容を維持保存するために、HMX-26が利用されることとなったのである。
しかし、この経緯にはいささか不明瞭な点が多い。HD-CNSの内容は、採用されたホロダイナミックアーキテクチャの性質上、複製することが極めて困難で、事実上不可能と言われている。にも関わらず開発部は、内容の保存を決定してから、わずか一週間でHMX-12からHMX-26への全てのデータの転送を完了させ、起動試験を行っている。
そのため、開発部外では、HMX-26はHMX-12をバックアップするために意図的に開発されたものではないかと見る向きも多い。HMX-26が、一般家庭内での耐久テストを継続中であるとされ、その詳細が部外秘とされている事から、その心象をなお強くさせている。
用語解説
ユビキタス
(ubiquitous)
ラテン語。遍在(至る所に存在する)という意味。ユビキタス・コンピューティングは、マーク・ワイザー氏が提唱したもので、メインフレーム(一台:複数のユーザー)、パーソナルコンピューター(一台:一人のユーザー)と経て、一人が複数のコンピュータを使う第三世代を示している。
ユビキタス・コンピューティングとはインターネットや家庭内LANなどにどこからでも接触(アクセス)可能な環境である事を示す。「パーバシブ(pervasive)・コンピューティング」ということもある。
HMXシリーズは、HASS同様、ユビキタスコンピューティングが実現されつつある社会においての、ヨブ・コンプレックスなどのテクノストレスを軽減するためのインタフェイス部としての役割も与えられている。
(よく『ユキビタス』と書かれることがあるが、これは間違い。)
FTF(マルチモーダル)インタフェイス
(Face To Face Multimodal interface)
自然語及び所作解析による命令認識システム。HMXシリーズの根幹技術の一つ。人間の自然語、所作を理解し、ユーザーの利便を計るもので、HASSがコンソールからの指示と対して変わらない、アクティブかつ明確な要求にしか応答できなかったのに対して、HMXはユーザーのパッシブで隠喩的な要求に対しても応答することができる(『思いやりのアルゴリズム』)。これは、競合他社製品に対してのHMXの極めて優れた特性の一つであったが、製品化されたHMシリーズにおいては、これらは実現されていなかった。
ホロダイナミック型中枢処理システム
(Holo-Dynamic Central Nerv System:HD-CNS)
32ビットプロセッサの複合体。各プロセッサがそれぞれ64K〜1MBのメモリを持ち、それぞれ他の多数のプロセッサと並列的に接続されており、非同期的にデータ交換を行う事が可能なI/Oを有する。各プロセッサは、実行プログラム実体であるカーネルと、入力に対する出力の重みだけをメモリに蓄積しており、単一のプロセッサとして見ればそれほど高い機能を持っていない。
光回路CNS
(Light-Diffraction Holo-Dynamic CNS:LDHD-CNS)
更に進化した形態のホロダイナミックCNSで、半球形状の光回路で構成されている。光回路網上で発生した光(出力)を他の光回路が入力として受け取る構造になっている。理論上、光速での演算処理が可能。ただし、固体中での光速は、真空中のそれに比べ、平均して60%前後となることから、固体半導体回路と比べて特異的に処理能力が優れているというわけではない。ただし、光回路の入出力は、文字通りの光であり、電流のように回路に制約されることがない。そのため、ある処理単位の出力を、不特定多数の処理単位が入力として受け取ることが可能である。これは光回路の重要な利点であり、また欠点でもある。光ノイズを防ぐために、外部はミラーコートされているが、駆動時の光回路CNSを見ると、虹色の光と干渉光とが美しく舞う姿を見ることができる。